AD変換の精度を確保するのは容易ではないが,マウスではジャイロセンサだけは特に高精度でデータを得たい.こじまうす5ではモータを回すとかなり不安定になり,ほとんど積分なんてできないレベルであった.
原因としては,DC-DCコンバータによって必要な電圧を作っていたこと,モータからのノイズ,などと漠然と考えていた.
試作基板にてフォトセンサのテストをしようとしていたところ,同様の現象に直面.目的を変更してその原因を調査することにした.
AD変換は10kHz,モータ駆動のPWMは20kHz.どうも特定のduty比のときに値がシフトする.これはすなわち,モータのon-offもしくはoff-onのときのノイズがちょうどAD変換のタイミングと一致しているときにAD変換値が正しくなくなる,というよりもADCの端子電圧がノイズでずれるということであろう.
どうしたものか.とりあえずコンデンサか?しかし具体的にどこからのノイズかわからないことには...オシロスコープか.
27日の関西支部の集まりには参加できませんでした.土曜日に行事があることはあまりないのですが,今回は偶然重なってしまいました.いずれにしても丸一日使う余裕がないという話もあるが.
2010年2月28日日曜日
2010年2月20日土曜日
2010年2月13日土曜日
LY530ALH
さらに続いてSTマイクロのジャイロセンサLY530ALH.これはかなりいろんなところで話題になっている.

まずハンダ付けに関しては,こいつは横に金属がでてないのでちょっとやっかいそう.ただまあ,近くを熱してハンダを流せば染み込んでいくかんじでつけられる.ちゃんとついたか目視で確認はできないが.

次に性能.ジャイロセンサはその出力を積分して角度を知るのが最大の目的なので,ゼロ点がドリフトしては困る.とりあえず静止状態で50ms間隔で10000点サンプリング.標準偏差は1.5~2くらいだが,それには興味がない.平均値の時間変化率は,
OUTZ・・・-0.00082 /s
vref・・・-0.00065 /s
とほとんど無視できるような.

あと評価すべきは応答速度と線形性.どちらもロボットに搭載して調べるのがいいように思うがそれはもうちょっと先になってしまう.データシート上は140Hzと遅いように思うがどうだろうか.

まずハンダ付けに関しては,こいつは横に金属がでてないのでちょっとやっかいそう.ただまあ,近くを熱してハンダを流せば染み込んでいくかんじでつけられる.ちゃんとついたか目視で確認はできないが.

次に性能.ジャイロセンサはその出力を積分して角度を知るのが最大の目的なので,ゼロ点がドリフトしては困る.とりあえず静止状態で50ms間隔で10000点サンプリング.標準偏差は1.5~2くらいだが,それには興味がない.平均値の時間変化率は,
OUTZ・・・-0.00082 /s
vref・・・-0.00065 /s
とほとんど無視できるような.

あと評価すべきは応答速度と線形性.どちらもロボットに搭載して調べるのがいいように思うがそれはもうちょっと先になってしまう.データシート上は140Hzと遅いように思うがどうだろうか.
2010年2月10日水曜日
LQFP64
続きまして,STM32の64ピンパッケージ.フラックスがあればそれほど難しくはなく実装できる.手先の器用さよりも半田の表面張力,粘性,フラックスの効果を感覚的にわかっていることが重要である.こじまうす5はひっぺがしたパッケージを再度ハンダ付けして使っていた.さすがにそういうことをすると接触不良が多発したが.

これは秋月の変換基板であるが,レジストがあるので余裕だった.
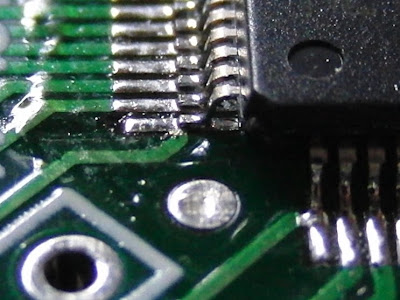
ちょっと半田が少ないかな.

これは秋月の変換基板であるが,レジストがあるので余裕だった.

ちょっと半田が少ないかな.
2010年2月8日月曜日
A3906
最近は主にハーフマウスに使うことを検討している部品のテストをしている.どうしても誰かと(というより大多数と)部品がかぶるのは仕方がない.
まずは,モータドライバIC.だいぶ前に存在を知って,こちらでも名前がでてくるが,非常に小さく1素子で2個モータをドライブできる.
半田付けがやっかいかと思ったが,これは側面に金属部分が出ているので簡単だった.


小さい部品になると実装できるかどうかの問題がでてくるので,こういう写真が重要な情報源になりうるのではないかと思い,公開する.
それで,だいたいデータシートどおりに組んでPWM信号を送ってみると,とりあえず回った.しかし,急激にduty比を変化させるとお亡くなりになった.
- 変換基板を使っているのでコンデンサまでの距離が遠い
- コンデンサが電解コンデンサ10uFと小さすぎる
- セラミックコンデンサもいれるべき
などと考える.部品が足りないので保留.
まずは,モータドライバIC.だいぶ前に存在を知って,こちらでも名前がでてくるが,非常に小さく1素子で2個モータをドライブできる.
半田付けがやっかいかと思ったが,これは側面に金属部分が出ているので簡単だった.


小さい部品になると実装できるかどうかの問題がでてくるので,こういう写真が重要な情報源になりうるのではないかと思い,公開する.
それで,だいたいデータシートどおりに組んでPWM信号を送ってみると,とりあえず回った.しかし,急激にduty比を変化させるとお亡くなりになった.
- 変換基板を使っているのでコンデンサまでの距離が遠い
- コンデンサが電解コンデンサ10uFと小さすぎる
- セラミックコンデンサもいれるべき
などと考える.部品が足りないので保留.