向心力(遠心力)が働く --> スリップ角が生じる
タイヤの変形の観点から言えば,遠心力が働いてタイヤが曲げられるのでマウスの向いている向きと実際に移動している向きは少しずれる,つまりスリップ角が存在するということになろう.
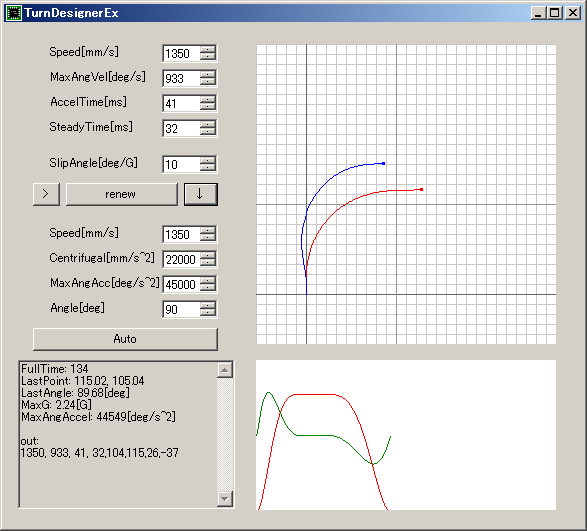
しかし,これをもとに少し考えると変な軌道を想像できる.私は実際に計算したことはないが,以下に引用するkatoさんの計算によく表れている.もしかしたらそういう図ではないかもしれませんが.いずれにせよ,今の捉え方では右向きにターンしようとしているのにはじめの位置よりも左にそれる軌道を描くことになってしまう.
ロボット工作研究室より引用
そこで,冷静になって視点を変えてみる.
スリップ角が生じる --> 向心力が働く
つまり,タイヤが変形するから戻ろうとする力によって向心力を得る.こう考えると,高速スラロームが縦に伸びる理由も説明できる.角速度が生じている時点で向心力が働いて円運動するのではなく,
角加速度 --> 角速度 --> 角度 = スリップ角 = 向心力
のようにもう一段階遅れて角度が生じてから向心力が働くので円運動に入るまでに時間がかかり,軌道は縦方向に伸びる.
2 件のコメント:
実はこのツール、理想値から求めた遠心力に比例した角度を進行方向にオフセットしているだけで、厳密に正確なモデルではありません。
実際はスリップアングルの変化によって曲率も変わり、遠心力が変動するはずなのですが、それを考慮したモデルにすると計算が発散してしまったので今の形になっています。
実際には、曲がる方向と反対側にそれるということはないようです。ただ、この手抜きモデルでも終端位置のズレはそこそこ予測できたため、動けばいーやの精神でそのまま使っています。
実車関係ではさすがに色々研究されているようで、調べると面白いです。ドリフト走行だと、駆動力によって向心力を得ていたりとか・・・
厳密ではないですけど終端位置はわりと正確に出ますね.なので私も同じようにして計算していたときがありました.
コメントを投稿