youtubeに31回大会の動画が大量にupされていることに気付く.
utsunomiyaさんの記事を見たときに気付くべきだった.
2010年12月18日土曜日
2010年12月12日日曜日
マウス合宿
マウス合宿に参加してきました.なんとなくマウスを走らせてみたり,ちょっとまじめにバグとりしてみたり.バグはとれませんでしたが...
フル迷路はないものの,ハーフに関しては9x9の迷路を使えたり,下の動画のように12x8の迷路を使えたり.この迷路では最短走行がうまくできてなく壁に当たってます.まあ仕方ないか.
合宿の雰囲気などはそのうち関西支部のページに載ると思います.
フル迷路はないものの,ハーフに関しては9x9の迷路を使えたり,下の動画のように12x8の迷路を使えたり.この迷路では最短走行がうまくできてなく壁に当たってます.まあ仕方ないか.
合宿の雰囲気などはそのうち関西支部のページに載ると思います.
2010年11月21日日曜日
マイクロマウス2010決勝
全日本大会決勝が終わりました.これで今年のマウスも終わりで,毎年のことですが,楽しかった分現実に引き戻される帰りの新幹線が憂鬱です.
ハーフマウスは大変よく迷路が考えられていて,探索から苦労しました.
結果は,
こじまうす6A 57秒306 6位入賞,ニューテクノロジー賞
と最短走行は成功しませんでしたがぎりぎり入賞.
最短経路の135度ターンからの20区画以上の長い斜め走行が難しいとか,競技前に迷路清掃が行われずにほこりだらけとかいろいろありますが,私のマウスの場合はフォトセンサの不調が走れなかった主要因です.もともと十分な信号強度は得られておらず,事前にできる限りの対策はしていましたが,それでも普通の直進が走れないほどに影響を受けていたようです.ハーフはかなり力をいれていただけに残念ですが,ずっと気になっていたフォトセンサの問題が理解できたので収穫とします.(決勝の出走順は予選順位の逆順だそうですが,来年は間違わないようお願いします)

そういえば,副賞で怪我するくらい(流血の報告あり)先の細いピンセットをいただきました.これでもっとえげつないハンダ付けをしろと...
クラシックは調整不足で走る気が全くせず,その分全然緊張しませんでしたが,ふらふらしながらも走ってしまいました.最短走行のことなんて考えてなかったのでどんなパラメータで走らせていたのかわかりませんが,
こじまうす5 5秒848 6位入賞
まさかの入賞.毎年どの競技も決勝は入賞候補のマウスがどんどんリタイヤしていますので,今年は偶然チャンスが巡ってきたようです.(ちなみに私には関係ありませんでしたが,ほこりの観点からはシードマウスの出走順をもっと後にすべきだと思います)
参加者も多く,みんなぎりぎりまで調整するもんだから運営側は大変そうでしたね.お疲れ様でした.ではまた来年.
今年は休みの日にまだマウスをする時間がありましたが,次の休みからはそうはいかないので来年はどうなるだろうか.
ハーフマウスは大変よく迷路が考えられていて,探索から苦労しました.
結果は,
こじまうす6A 57秒306 6位入賞,ニューテクノロジー賞
と最短走行は成功しませんでしたがぎりぎり入賞.
最短経路の135度ターンからの20区画以上の長い斜め走行が難しいとか,競技前に迷路清掃が行われずにほこりだらけとかいろいろありますが,私のマウスの場合はフォトセンサの不調が走れなかった主要因です.もともと十分な信号強度は得られておらず,事前にできる限りの対策はしていましたが,それでも普通の直進が走れないほどに影響を受けていたようです.ハーフはかなり力をいれていただけに残念ですが,ずっと気になっていたフォトセンサの問題が理解できたので収穫とします.(決勝の出走順は予選順位の逆順だそうですが,来年は間違わないようお願いします)

そういえば,副賞で怪我するくらい(流血の報告あり)先の細いピンセットをいただきました.これでもっとえげつないハンダ付けをしろと...
クラシックは調整不足で走る気が全くせず,その分全然緊張しませんでしたが,ふらふらしながらも走ってしまいました.最短走行のことなんて考えてなかったのでどんなパラメータで走らせていたのかわかりませんが,
こじまうす5 5秒848 6位入賞
まさかの入賞.毎年どの競技も決勝は入賞候補のマウスがどんどんリタイヤしていますので,今年は偶然チャンスが巡ってきたようです.(ちなみに私には関係ありませんでしたが,ほこりの観点からはシードマウスの出走順をもっと後にすべきだと思います)
参加者も多く,みんなぎりぎりまで調整するもんだから運営側は大変そうでしたね.お疲れ様でした.ではまた来年.
今年は休みの日にまだマウスをする時間がありましたが,次の休みからはそうはいかないので来年はどうなるだろうか.
2010年11月20日土曜日
マイクロマウス2010予選
今日は予選でした.ハーフ,クラシックともにいろいろ問題があって調整とか修正とかしていたのでほとんど他の人の競技を見られませんでした.
ハーフマウス
こじまうす6 6秒996 5位(決勝進出タイム)
こじまうす6A 4秒745 2位,決勝進出
ハーフマウスは見ている人には普通に走れているように見えても,いろいろ問題があって明日走れるかというときわどい.外乱光はたいして強くはないのですが確実に効いていて今まで調整してきた値をばっさり捨てるはめになっています.とくに長い斜めは現在絶望的.
クラシックマウス
こじまうす5 7秒733 5位,決勝進出
クラシックは予選敗退を覚悟しました.タイムだけ見ると結果は悪くないですが内容はあまりにひどかった.やはり日頃調整していないと走りませんね.
そしてこじまうす6Aのモータドライバが接触不良でモータが逆転するけど正転せず.周囲の人からいろいろ借りて一応復活.ありがとうございました.
ハーフマウス
こじまうす6 6秒996 5位(決勝進出タイム)
こじまうす6A 4秒745 2位,決勝進出
ハーフマウスは見ている人には普通に走れているように見えても,いろいろ問題があって明日走れるかというときわどい.外乱光はたいして強くはないのですが確実に効いていて今まで調整してきた値をばっさり捨てるはめになっています.とくに長い斜めは現在絶望的.
クラシックマウス
こじまうす5 7秒733 5位,決勝進出
クラシックは予選敗退を覚悟しました.タイムだけ見ると結果は悪くないですが内容はあまりにひどかった.やはり日頃調整していないと走りませんね.
そしてこじまうす6Aのモータドライバが接触不良でモータが逆転するけど正転せず.周囲の人からいろいろ借りて一応復活.ありがとうございました.
調整中
クラシックマウスの調整中,というよりバグとり.スラロームコマンドをハーフマウスから移植して一応動作しているのをホテルの机上30cm四方くらいのスペースで確認.
あとはハーフマウスのゴール位置情報を確認.
眠くて妥協できるようになったので終了.
あとはハーフマウスのゴール位置情報を確認.
眠くて妥協できるようになったので終了.
2010年11月19日金曜日
つくば到着
ようやくホテルに着いた.つくばは4年目なのに道に迷って一時間以上も歩いていた.どうやら方角を90度間違っていたらしい.マウスが壁にぶつかって向きを見失うとどんどん迷路を壊していくのに似ている.
作業終了
おかしな挙動を見てしまわないうちに作業を打ち切った.あとは長い斜めの走行速度だけ決定すればいいはず.攻めすぎると会場でマウスが大破するかも.
以上はハーフの話.クラシックは時間も迷路もないので当日に調整する.つまりは出走順次第.失敗すると完走すらできなくなる.
ちなみに明日(今日?)は平常通りで,夜につくば入り.移動途中にクラシックのプログラムを書き換える.(大丈夫か?)
以上はハーフの話.クラシックは時間も迷路もないので当日に調整する.つまりは出走順次第.失敗すると完走すらできなくなる.
ちなみに明日(今日?)は平常通りで,夜につくば入り.移動途中にクラシックのプログラムを書き換える.(大丈夫か?)
2010年11月17日水曜日
探索の調整完了
探索走行についてはとりあえず調整完了した.下の動画くらい走れていればたぶん大丈夫でしょう.
経験定数が少し消えたのはよかったが,問題も浮上した.
- 探索から帰ってこれないパターンがある
上の動画も帰って来ず,ストップしている.特に問題にはならないけど最短走行の計算にバグがあるということなので不安.
- 歯車にごみがはさまる
ハーフマウスは小さすぎてごみがはさまって動けなくなることがある.本番の迷路はけっこう汚いと思うのでかなり不安.探索で長い距離走っているとごみをひろう確率は高くなる.でも打つ手なし.運任せ.
経験定数が少し消えたのはよかったが,問題も浮上した.
- 探索から帰ってこれないパターンがある
上の動画も帰って来ず,ストップしている.特に問題にはならないけど最短走行の計算にバグがあるということなので不安.
- 歯車にごみがはさまる
ハーフマウスは小さすぎてごみがはさまって動けなくなることがある.本番の迷路はけっこう汚いと思うのでかなり不安.探索で長い距離走っているとごみをひろう確率は高くなる.でも打つ手なし.運任せ.
2010年11月16日火曜日
2010年11月15日月曜日
調整
探索はまだ最後の調整を必要とするものの安定して走れそうな状態に戻った.探索終了後戻って来ないパターンがあるとか,まれに迷路データが壊れるとかちょっと問題もあるけど探っている時間はない.本番で迷路データ壊れたら最悪だが.
最短走行の方はどうも限界が下がったような気がする上にターンの再現性がかなり悪い.結局一日費やしたがイマイチ.どこかで妥協点を見つけないと.
フル迷路を使う機会を逃したので次は本番.の前に土曜日の試走台で最終確認.出走が早かったら無理だが.
最短走行の方はどうも限界が下がったような気がする上にターンの再現性がかなり悪い.結局一日費やしたがイマイチ.どこかで妥協点を見つけないと.
フル迷路を使う機会を逃したので次は本番.の前に土曜日の試走台で最終確認.出走が早かったら無理だが.
2010年11月14日日曜日
不調
やればやるほど悪化する.一週間ぶりにハーフマウスを走らせるとなんだか様子がおかしい.調整するとどんどんはまる.ついには探索すらふらつく.
このままでは中部の試走会に行っても意味がない.よって自宅で調整.
このままでは中部の試走会に行っても意味がない.よって自宅で調整.
2010年11月13日土曜日
クラシック挫折
クラシックサイズは去年の機体で参加予定だが,中部地区大会で遅かったのでハーフのプログラム移植を昨日から試みているが...フォトセンサのノイズがあまりに大きいので挫折.無理.
ということでタイヤ交換だけ.ハーフの完成度次第では少し改良の時間がとれるかもしれない.
いずれにしても前日の試走会に参加できないので明日の中部の試走会に行こうかと思う.ということはソフト改良は明日の移動中までにしなければならない.さすがに時間が足りないか.
ということでタイヤ交換だけ.ハーフの完成度次第では少し改良の時間がとれるかもしれない.
いずれにしても前日の試走会に参加できないので明日の中部の試走会に行こうかと思う.ということはソフト改良は明日の移動中までにしなければならない.さすがに時間が足りないか.
フォトセンサ3
前回問題として残ったのはフォトトランジスタの非線形性であった.以下簡単に補正できるかもしれない方法.
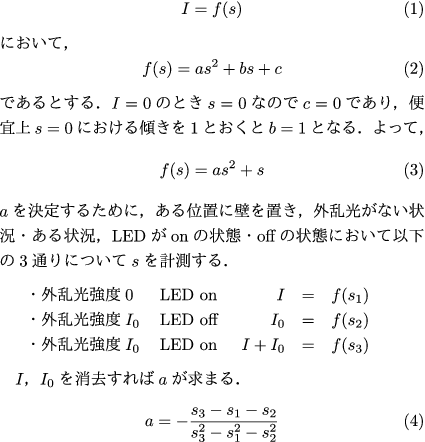
単に2次曲線で近似しているだけである.簡単に組み込めるわりにはそれなりの効果があると思っている.定数aを0にしておけば従来の使い方と全く同じであるから,プログラムの構造を変更する必要もない.
単に2次曲線で近似しているだけである.簡単に組み込めるわりにはそれなりの効果があると思っている.定数aを0にしておけば従来の使い方と全く同じであるから,プログラムの構造を変更する必要もない.
2010年11月7日日曜日
最短走行調整中
フォトセンサのネタはあと一つありますが,今日は最短走行の動画をup.
中部地区大会のときには走れなかったパターンも走れるようになり,その他いくつかバグをつぶすなどして,横方向に1.5Gかかるターンくらいなら安定してきました.それほどたくさんのパターンを試せてませんが.
今日は学生大会でしたね.参加メンバーを考えると各競技ともかなりレベルが高かったのではないかと思います.私も参加したかったけれどもやはりちょっと時間的に無理でしたね.そして今年は全日本大会の前日試走会に参加できないという事態に.競技の日にかぶってこなかったのでよしとしましょう.
中部地区大会のときには走れなかったパターンも走れるようになり,その他いくつかバグをつぶすなどして,横方向に1.5Gかかるターンくらいなら安定してきました.それほどたくさんのパターンを試せてませんが.
今日は学生大会でしたね.参加メンバーを考えると各競技ともかなりレベルが高かったのではないかと思います.私も参加したかったけれどもやはりちょっと時間的に無理でしたね.そして今年は全日本大会の前日試走会に参加できないという事態に.競技の日にかぶってこなかったのでよしとしましょう.
フォトセンサ2
外乱光が定常かつセンサ出力が光強度に比例するならば前回のように簡単な回路,簡単な処理でほしい信号だけを取り出すことができる.実際にはそうはいかない場合がありうるので思いつくことを挙げて考えてみる.
・フォトトランジスタは反応が遅い
フォトダイオードはほとんど時間遅れなく信号が出るが,フォトトランジスタは50us程度と遅い.しかも光強度によって反応時間が変化するため,CRハイパスフィルタなどで外乱光除去するのは困難である.そのため,LEDを発光させてから50us程度待ってからサンプリングし,ソフトウェアで外乱光を除去する方式の方がよい.
・外乱光は定常ではない
カメラのフラッシュについては回路で除去するのは困難であるが,ソフトウェアで除去すればよい.白熱灯のようなものはほとんど定常光だと思われるが,つくばカピオには100Hzで強度が変化するライトがある(蛍光灯も同様に100Hzですが,弱いので地区大会などでは問題にならない).でもこれも50usから見れば長周期なのでなんら問題はないはずである.
・外乱光だけでフォトトラが飽和するかもしれない
そうならないように挟角,高輝度のLEDを使い,十分余裕をもたせて電流-電圧変換抵抗を選ぶ.余裕をもたせると分解能が犠牲になるが,フォトセンサにはそれほど分解能は要求されない.こじまうす6Aでは200/4000くらいしかでていない(ただの設計ミスともいえるが).
・フォトトランジスタの非線形性
ハーフマウスに使うために小さい素子を選ぶと,線形性がかなり悪い.LEDも小さくもともとS/N比が小さいこともあるが,懐中電灯で照らすと無視できないほど出力が変化する.引き算で外乱光を除去できない.中部地区大会のときはなんとかなっていたが,全日本大会ではやられる可能性が高い(ああいう会場は赤外線が強い).回路ではどうにもならないが,ソフトウェアで外乱除去する方式だと非線形性を考慮する余地があるといえばある.
・フォトトランジスタは反応が遅い
フォトダイオードはほとんど時間遅れなく信号が出るが,フォトトランジスタは50us程度と遅い.しかも光強度によって反応時間が変化するため,CRハイパスフィルタなどで外乱光除去するのは困難である.そのため,LEDを発光させてから50us程度待ってからサンプリングし,ソフトウェアで外乱光を除去する方式の方がよい.
・外乱光は定常ではない
カメラのフラッシュについては回路で除去するのは困難であるが,ソフトウェアで除去すればよい.白熱灯のようなものはほとんど定常光だと思われるが,つくばカピオには100Hzで強度が変化するライトがある(蛍光灯も同様に100Hzですが,弱いので地区大会などでは問題にならない).でもこれも50usから見れば長周期なのでなんら問題はないはずである.
・外乱光だけでフォトトラが飽和するかもしれない
そうならないように挟角,高輝度のLEDを使い,十分余裕をもたせて電流-電圧変換抵抗を選ぶ.余裕をもたせると分解能が犠牲になるが,フォトセンサにはそれほど分解能は要求されない.こじまうす6Aでは200/4000くらいしかでていない(ただの設計ミスともいえるが).
・フォトトランジスタの非線形性
ハーフマウスに使うために小さい素子を選ぶと,線形性がかなり悪い.LEDも小さくもともとS/N比が小さいこともあるが,懐中電灯で照らすと無視できないほど出力が変化する.引き算で外乱光を除去できない.中部地区大会のときはなんとかなっていたが,全日本大会ではやられる可能性が高い(ああいう会場は赤外線が強い).回路ではどうにもならないが,ソフトウェアで外乱除去する方式だと非線形性を考慮する余地があるといえばある.
2010年11月6日土曜日
フォトセンサ
今日からはフォトセンサの話.
SFH4550のような半値角が狭く明るいLEDが安価に手に入るので,以下のようなフィルタをかませない構成が主流になると思われる.すでに主流か?今年の私のマウスも同様の構成である.

この場合,2回サンプリングしてソフトウェアで外乱光を除去する必要がある.TPS601Aのように非常によいリニアリティを有するセンサの場合は以下のように簡単に外乱光を除去できる.

これだけではまだ簡単・当たり前でおもしろくない話.
SFH4550のような半値角が狭く明るいLEDが安価に手に入るので,以下のようなフィルタをかませない構成が主流になると思われる.すでに主流か?今年の私のマウスも同様の構成である.
この場合,2回サンプリングしてソフトウェアで外乱光を除去する必要がある.TPS601Aのように非常によいリニアリティを有するセンサの場合は以下のように簡単に外乱光を除去できる.
これだけではまだ簡単・当たり前でおもしろくない話.
2010年11月4日木曜日
スリップ角 その4
今回のは具体的な計算方法を考える.小ネタだが,実際に計算するときには重要となる場合もある.

この式を使って一定時間間隔の割り込み内でスリップ角を計算していく.私のマウスの場合,定数kはおよそ100[m/s^2]である.陰的に離散化するのは今年導入した方法で安定化させるために場合分けとかする必要がないので便利である.
この式を使って一定時間間隔の割り込み内でスリップ角を計算していく.私のマウスの場合,定数kはおよそ100[m/s^2]である.陰的に離散化するのは今年導入した方法で安定化させるために場合分けとかする必要がないので便利である.
2010年11月3日水曜日
スリップ角 その3
どうやって考えたらよいかまとまったので,実際に計算できるように式を立てる.

私のマウスでは2年前からスリップ角の考え方を導入し,昨年からこの式を使ってデッドレコニングしている.スラローム旋回が縦方向に伸びることについては先読みして早めにスラローム旋回を開始する.
私のマウスでは2年前からスリップ角の考え方を導入し,昨年からこの式を使ってデッドレコニングしている.スラローム旋回が縦方向に伸びることについては先読みして早めにスラローム旋回を開始する.
スリップ角 その2
スリップ角についてもう少し考えてみよう.スラローム旋回のときのマウスの軌道はどうなっているんだろう?うーん...と考えている立場からすると,次のように捉えるのではなかろうか.
向心力(遠心力)が働く --> スリップ角が生じる
タイヤの変形の観点から言えば,遠心力が働いてタイヤが曲げられるのでマウスの向いている向きと実際に移動している向きは少しずれる,つまりスリップ角が存在するということになろう.
しかし,これをもとに少し考えると変な軌道を想像できる.私は実際に計算したことはないが,以下に引用するkatoさんの計算によく表れている.もしかしたらそういう図ではないかもしれませんが.いずれにせよ,今の捉え方では右向きにターンしようとしているのにはじめの位置よりも左にそれる軌道を描くことになってしまう.

そこで,冷静になって視点を変えてみる.
スリップ角が生じる --> 向心力が働く
つまり,タイヤが変形するから戻ろうとする力によって向心力を得る.こう考えると,高速スラロームが縦に伸びる理由も説明できる.角速度が生じている時点で向心力が働いて円運動するのではなく,
角加速度 --> 角速度 --> 角度 = スリップ角 = 向心力
のようにもう一段階遅れて角度が生じてから向心力が働くので円運動に入るまでに時間がかかり,軌道は縦方向に伸びる.
向心力(遠心力)が働く --> スリップ角が生じる
タイヤの変形の観点から言えば,遠心力が働いてタイヤが曲げられるのでマウスの向いている向きと実際に移動している向きは少しずれる,つまりスリップ角が存在するということになろう.
しかし,これをもとに少し考えると変な軌道を想像できる.私は実際に計算したことはないが,以下に引用するkatoさんの計算によく表れている.もしかしたらそういう図ではないかもしれませんが.いずれにせよ,今の捉え方では右向きにターンしようとしているのにはじめの位置よりも左にそれる軌道を描くことになってしまう.
ロボット工作研究室より引用
そこで,冷静になって視点を変えてみる.
スリップ角が生じる --> 向心力が働く
つまり,タイヤが変形するから戻ろうとする力によって向心力を得る.こう考えると,高速スラロームが縦に伸びる理由も説明できる.角速度が生じている時点で向心力が働いて円運動するのではなく,
角加速度 --> 角速度 --> 角度 = スリップ角 = 向心力
のようにもう一段階遅れて角度が生じてから向心力が働くので円運動に入るまでに時間がかかり,軌道は縦方向に伸びる.
2010年11月1日月曜日
スリップ角
マウスの旋回速度が大きくなってくると,理屈通りの軌道を描かない.というよりも軌道を十分予測できるような理屈を考えられていない.ここではマウスの横方向には常に速度が0であると考えているが,それに代わる何か新しいことを考えなければならない.まあ実際にはなぜ軌道を予測できないかはわかっていなくても経験定数で丸め込めばマウスは走るわけだが.
でもまあそれでは今後の発展がないので何か考えるわけだが,今最も大きく効いていると思っているのはスリップ角である.これは実際にkatoさんがスラローム旋回をつくるときに考慮しているらしい.そこで示されている軌道を見ると,スリップ角を考慮するとかなり軌道が変わることがわかるが,高速でスラローム旋回すると実際にそれくらいずれる.
軌道はかなり変化するが,それには再現性があり,しかもスリップ角を使ってそのずれを説明することができる.こうしたことから,スリップ角の考え方,すなわち,マウスの向いている方向と実際にマウスが動いている方向は少し異なると考えることが重要そうである.
でもまあそれでは今後の発展がないので何か考えるわけだが,今最も大きく効いていると思っているのはスリップ角である.これは実際にkatoさんがスラローム旋回をつくるときに考慮しているらしい.そこで示されている軌道を見ると,スリップ角を考慮するとかなり軌道が変わることがわかるが,高速でスラローム旋回すると実際にそれくらいずれる.
軌道はかなり変化するが,それには再現性があり,しかもスリップ角を使ってそのずれを説明することができる.こうしたことから,スリップ角の考え方,すなわち,マウスの向いている方向と実際にマウスが動いている方向は少し異なると考えることが重要そうである.
2010年10月31日日曜日
原因究明
中部地区大会では走れるパラメータと走れないパラメータがはっきりとわかれた.現状を把握するために引っかかった迷路のパターンを再現してテスト走行.
走れたパラメータ(横Gが1.2)の動画. 行き,帰りとも問題なく走れている.
走れなかったパラメータ(横Gが1.4)の動画.やはり同じところで壁に接触している.音を聞かないとわからないけども.
実は斜め45度ターンは調整してなくて苦手なのである.少しこのパターンで調整することとする.
え?迷路が広くなってるって?
はい.追加投資しました.
走れたパラメータ(横Gが1.2)の動画. 行き,帰りとも問題なく走れている.
走れなかったパラメータ(横Gが1.4)の動画.やはり同じところで壁に接触している.音を聞かないとわからないけども.
実は斜め45度ターンは調整してなくて苦手なのである.少しこのパターンで調整することとする.
え?迷路が広くなってるって?
はい.追加投資しました.
2010年10月30日土曜日
学生大会スキップ
私は現在博士後期課程2年の学生(ちなみに専門はマウスとは関係ない)なので学生大会に参加する気だったのですが,中部地区大会後体調を崩していて来週末も体力的に余裕があるとは到底思えないので不参加とした.
いずれにしても大学院に行くとなんだか学生大会は参加しにくく感じる.おそらく以下の理由.
1. フレッシュな学生に比べて経験年数がかなり長い
2. ほぼ確実に上位に入るため他の学生の順位を落としてしまう
3. サークルとの関わりが薄くなり,学生という気分が抜けている
しかし,学生大会は初級者大会ではないので1,2の理由はおかしい.むしろ学生のレベルアップのためには経験豊富な人が積極的に参加すべきであろう.初心者は速いマウスを見て衝撃を覚えるくらいがいい.3はどうしようもない.なんかaway感がある.
以下直接は関係ないかもしれないひとりごと.
今はブログ等でたくさんの情報が公開されているわけであるから,時間のある学生がそれら情報を活用して十分調整された速いマウスを完成させるのは自然なかたちだと思うし,全日本大会でも日本人上位は学生ばっかりという状態でもおかしくないと思っている.
そろそろノウハウをばらまき始めねば.
いずれにしても大学院に行くとなんだか学生大会は参加しにくく感じる.おそらく以下の理由.
1. フレッシュな学生に比べて経験年数がかなり長い
2. ほぼ確実に上位に入るため他の学生の順位を落としてしまう
3. サークルとの関わりが薄くなり,学生という気分が抜けている
しかし,学生大会は初級者大会ではないので1,2の理由はおかしい.むしろ学生のレベルアップのためには経験豊富な人が積極的に参加すべきであろう.初心者は速いマウスを見て衝撃を覚えるくらいがいい.3はどうしようもない.なんかaway感がある.
以下直接は関係ないかもしれないひとりごと.
今はブログ等でたくさんの情報が公開されているわけであるから,時間のある学生がそれら情報を活用して十分調整された速いマウスを完成させるのは自然なかたちだと思うし,全日本大会でも日本人上位は学生ばっかりという状態でもおかしくないと思っている.
そろそろノウハウをばらまき始めねば.
2010年10月26日火曜日
中部地区大会
中部地区大会に参加.
・マイクロマウスクラシック競技
こじまうす5 8秒259
関西支部大会から調整していない.下手に調整していないので無難に走る.でも昨年の全日本大会とか中部地区の忘年会とかよりもかなり遅い.なぜだ?
・サーキット競技
こじまうす5 9秒200 特別賞
バッテリがヘタっているのか2走目,3走目は加速中に電圧降下でストップした.残念.
・マイクロマウス(ハーフサイズ)競技
こじまうす6 6秒436
こじまうす6A 5秒101 準優勝
ハーフサイズはもうちょっと速いパラメータで走ってくれると思ってましたが,3回も同じパターンでひっかかる.決定的に弱いパターンがあるらしい.出走順が巧みに設定されていたおかげで会場を盛り上げることができたように思います.
大会に参加できなくて結果が気になっている方もいらっしゃると思うので結果を貼りつけ.


次は...学生大会?
・マイクロマウスクラシック競技
こじまうす5 8秒259
関西支部大会から調整していない.下手に調整していないので無難に走る.でも昨年の全日本大会とか中部地区の忘年会とかよりもかなり遅い.なぜだ?
・サーキット競技
こじまうす5 9秒200 特別賞
バッテリがヘタっているのか2走目,3走目は加速中に電圧降下でストップした.残念.
・マイクロマウス(ハーフサイズ)競技
こじまうす6 6秒436
こじまうす6A 5秒101 準優勝
ハーフサイズはもうちょっと速いパラメータで走ってくれると思ってましたが,3回も同じパターンでひっかかる.決定的に弱いパターンがあるらしい.出走順が巧みに設定されていたおかげで会場を盛り上げることができたように思います.
大会に参加できなくて結果が気になっている方もいらっしゃると思うので結果を貼りつけ.


次は...学生大会?
2010年10月23日土曜日
中部地区大会前日
新作マウスが最短走行もできるようになった.ただし,明日長い直線で何が起こるかはわからない.
あとは,なんか探索が不安定になってきたので原因を探っておく.
ちなみに新作以外は全然さわってない.動作チェックだけはしておこうか.
追記:
ゴール位置を確認するためにNTFのページを見に行ったら
と書いてあるではありませんか.私のマウスは柱周り3つ壁なしなら残りの1つは壁ありとする.しかし実際に壁を見たときには壁がない.だからエラーで止まる.最短走行できない.というひどいことになるところだった.とりあえずコメントアウトする.
あとは,なんか探索が不安定になってきたので原因を探っておく.
ちなみに新作以外は全然さわってない.動作チェックだけはしておこうか.
追記:
ゴール位置を確認するためにNTFのページを見に行ったら
※ゴール領域は2×2とし中心の柱は置かない
と書いてあるではありませんか.私のマウスは柱周り3つ壁なしなら残りの1つは壁ありとする.しかし実際に壁を見たときには壁がない.だからエラーで止まる.最短走行できない.というひどいことになるところだった.とりあえずコメントアウトする.
switch文
c言語,というよりc++言語でswitch文中で
などとやるとコンパイラに怒られる.
braceを使ってスコープを制限すると大丈夫.へー,なるほど.
case 2:
float ang = DEG180;
...
break;
などとやるとコンパイラに怒られる.
braceを使ってスコープを制限すると大丈夫.へー,なるほど.
case 2:{
float ang = DEG180;
...
break;}
2010年10月19日火曜日
探索走行
探索走行らしい動きはできるようになった.でも,探索走行はかなり高い成功率が求められることを考えればまだまだあまい.ちょっとずれると壁を読み間違うのでずれてるなあと思ったらアウトである.
クラシックの方はどうしようか.かなりプログラムを書き換えたいけどそんなことしている時間はない気がする.というか試走するための迷路がない.
クラシックの方はどうしようか.かなりプログラムを書き換えたいけどそんなことしている時間はない気がする.というか試走するための迷路がない.
2010年10月17日日曜日
計画
今年はクラシック用に新作は作らない.どう考えても時間がない.昨年の機体を登録しておいたが,それの調整すら面倒である.ハーフに力を入れたい.大会については,
・中部地区大会
・全日本大会
だけになるか.一応いまだに学生だが,学生大会はなんとなく飛び込みにくい.
新作はなんとか走れそうな気分になってきた.でもまだ十分安定して探索できない.ハーフではどうもフォトセンサがうまく使えない.そしてタイヤ速度の読み取りが明らかにうまくいっていない.かなり長期間のスムージングでごまかす.
そういえばサーキット競技の登録を忘れていたのでしておいた.
・中部地区大会
・全日本大会
だけになるか.一応いまだに学生だが,学生大会はなんとなく飛び込みにくい.
新作はなんとか走れそうな気分になってきた.でもまだ十分安定して探索できない.ハーフではどうもフォトセンサがうまく使えない.そしてタイヤ速度の読み取りが明らかにうまくいっていない.かなり長期間のスムージングでごまかす.
そういえばサーキット競技の登録を忘れていたのでしておいた.
2010年10月16日土曜日
ちょっと不満を
すみませんが,今日はちょっと不満を.小出しにしたくないのでまとめて.
各大会の参加登録は今年から共通のシステムになりわかりやすくなった.おそらく管理もしやすいのだろう.特に複数のロボットを登録するときに住所等共通のデータを再入力する必要がなくなった点はすばらしい.しかし,仮申込受付のメールの文章がちょっと変である.
x「テクニカルデータを登録行なうまで...」
o「テクニカルデータの登録を行(な)うまで...」
どの大会に登録しても送られてくる部分なので,こういうところは十分チェックしておいて欲しい.昨年から変更されていないようだが,誰も指摘しなかった上に誰もチェックせずに今年も使っているということだろうか.
また,全日本大会登録のページによるとクラシックエキスパート以外は各競技一人一台に限るらしい.ハーフマウスの競技規定には「同一製作者のロボットの参加登録台数については制限しません。」と赤字で書いてあるから二台出すつもりだったのに.二台目を登録しようとしてもシステムにはねられる.規定を変更したのにシステムを変更していないということだろうか.その点をEメールで問い合わせても返事がない.申込が締め切られたのですが.
さらに,全日本大会の参加費支払いが不透明である.支払い方法を選んでからその詳細が通知されるのでは「都合の良い支払い方法をお選びください」と言われたところでどれが都合が良いか判断できないではないか.また,「ご登録者の振込手数料等の負担はなくなりました」とあるけれども銀行振込を選択した場合はその銀行に口座を持ってないと手数料がかかるわけで.あらかじめ口座がわからない状況では判断できないわけで.
以上のことが起こるのはおそらく運営が超少人数で行われていて細かいことまで手が回らない状態だからだと推測する.特にこれからの時期は忙しくなると思いますが,来年以降,以上の不備を改善いただけたらと思います.
各大会の参加登録は今年から共通のシステムになりわかりやすくなった.おそらく管理もしやすいのだろう.特に複数のロボットを登録するときに住所等共通のデータを再入力する必要がなくなった点はすばらしい.しかし,仮申込受付のメールの文章がちょっと変である.
x「テクニカルデータを登録行なうまで...」
o「テクニカルデータの登録を行(な)うまで...」
どの大会に登録しても送られてくる部分なので,こういうところは十分チェックしておいて欲しい.昨年から変更されていないようだが,誰も指摘しなかった上に誰もチェックせずに今年も使っているということだろうか.
また,全日本大会登録のページによるとクラシックエキスパート以外は各競技一人一台に限るらしい.ハーフマウスの競技規定には「同一製作者のロボットの参加登録台数については制限しません。」と赤字で書いてあるから二台出すつもりだったのに.二台目を登録しようとしてもシステムにはねられる.規定を変更したのにシステムを変更していないということだろうか.その点をEメールで問い合わせても返事がない.申込が締め切られたのですが.
さらに,全日本大会の参加費支払いが不透明である.支払い方法を選んでからその詳細が通知されるのでは「都合の良い支払い方法をお選びください」と言われたところでどれが都合が良いか判断できないではないか.また,「ご登録者の振込手数料等の負担はなくなりました」とあるけれども銀行振込を選択した場合はその銀行に口座を持ってないと手数料がかかるわけで.あらかじめ口座がわからない状況では判断できないわけで.
以上のことが起こるのはおそらく運営が超少人数で行われていて細かいことまで手が回らない状態だからだと推測する.特にこれからの時期は忙しくなると思いますが,来年以降,以上の不備を改善いただけたらと思います.
2010年10月14日木曜日
完成
ようやくハードが完成した気分になった.まだ問題は出てくるだろうけど.
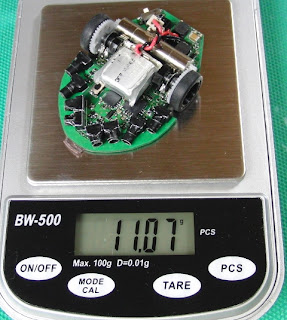
なかなか軽量.走れるかどうかは別問題.週末にテスト走行ができるだろう.
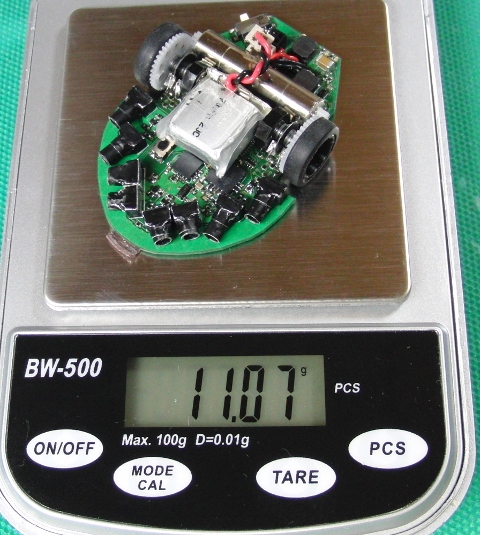
ハーフサイズマイクロマウス競技用2台目:こじまうす6A
なかなか軽量.走れるかどうかは別問題.週末にテスト走行ができるだろう.
2010年10月12日火曜日
2010年10月11日月曜日
ぎりぎりの配置
なんとか走るレベルまでもっていこうとするとかなり難しいハンダ付けが要求される.CADを使って軸に干渉しない範囲でなるべくS/Nを高くできる部品配置を考える.干渉していないか確認しながらできるだけ設計通りに部品を配置する.下の写真のものを合計4セット配置する.これはさすがに疲れました.

しかし,まだ動くかどうかはわかりません.

しかし,まだ動くかどうかはわかりません.
2010年10月9日土曜日
設計ミス
さて,一週間前に見つかった設計ミスがかなり致命的だということがわかってきた.エンコーダが機能しない.よって走れない.今日は走らせてみるつもりだったのだが,実際にものをつくると何かとうまくいかないことがでてきますね.
もうすこしねばりますか.
もうすこしねばりますか.
2010年10月7日木曜日

2010年10月5日火曜日
2010年10月3日日曜日
8割完成
8割完成したというより8割しか完成していないという方が正しい.レジストがあるのでハンダ付けはほとんど問題なく進む.Nakashimaさんの教訓を活かしこまめに動作チェックしながら進めたのでトラブルも短時間で解決.ただし,以下2点が痛い.
- 物理的に干渉するところがある.
- 加工ミスで部品作り直しの必要あり.
前者は設計変更したときに十分考えていなかったのが原因だが,なんとか目処は立った.またしてもアクロバティックなハンダ付けをする羽目になったが.
後者は今思えばいい加減に加工したからであるが,あのときは暗くてそれどころではなかった.

そういえば今日は北信越大会だったようで,誘われましたがさすがに遠いのでお断りさせていただきました.休むときに休まないと生きていけないのです.
- 物理的に干渉するところがある.
- 加工ミスで部品作り直しの必要あり.
前者は設計変更したときに十分考えていなかったのが原因だが,なんとか目処は立った.またしてもアクロバティックなハンダ付けをする羽目になったが.
後者は今思えばいい加減に加工したからであるが,あのときは暗くてそれどころではなかった.

そういえば今日は北信越大会だったようで,誘われましたがさすがに遠いのでお断りさせていただきました.休むときに休まないと生きていけないのです.
2010年10月2日土曜日
基板到着
当初は今回も自作基板でいけるかと思ったが,やはり基板厚を薄くしようとすると外注せざるをえない.今まで1.6mm厚しか使ったことがなく,基板の厚さと強度の関係がイマイチわからないが,katoさんの基板にならって0.6mm厚とした.
マウス作っている人はP板を利用する場合が多いように思うが,登録しようとして途中面倒になったことと個人だと支払いが代引きだけなのでやめた.代わりにプリント基板センターを利用してみた.デザインルールはだいたい同じで価格もだいたい同じ.今は偶然登録で1000ptついてきたので1000円引きで利用できた.
ハーフの基板なのでものはかなり小さいはずだが,届いた箱がやや大きい.開けてみるとテスターが入っていた.サービスらしい.肝心の基板は緩衝材にまぎれてあやうく粗末に扱うところであった.5枚発注したはずだが,6枚入っていた.製造上の都合かな?さらに初回利用だということで,3ヶ月有効な5000円引き券がついていた.

基板だけで2.0gである.ハーフの重量,大きさなら0.6mmでも割れる気はしない.来年は0.4mmか?
マウス作っている人はP板を利用する場合が多いように思うが,登録しようとして途中面倒になったことと個人だと支払いが代引きだけなのでやめた.代わりにプリント基板センターを利用してみた.デザインルールはだいたい同じで価格もだいたい同じ.今は偶然登録で1000ptついてきたので1000円引きで利用できた.
ハーフの基板なのでものはかなり小さいはずだが,届いた箱がやや大きい.開けてみるとテスターが入っていた.サービスらしい.肝心の基板は緩衝材にまぎれてあやうく粗末に扱うところであった.5枚発注したはずだが,6枚入っていた.製造上の都合かな?さらに初回利用だということで,3ヶ月有効な5000円引き券がついていた.

基板だけで2.0gである.ハーフの重量,大きさなら0.6mmでも割れる気はしない.来年は0.4mmか?
ホイールの加工
前回に続き駆動系部品の加工を行った.ホイールは加工手順を見直し,その結果満足いくものができた.モータ軸とタイヤとの干渉を避けるためにホイール直径9.2mmである.なんか不安.

相変わらず作業場所は暗いが,それより黒色POMは本当に見にくい.特に中ぐりのとき.

相変わらず作業場所は暗いが,それより黒色POMは本当に見にくい.特に中ぐりのとき.
2010年9月30日木曜日
蛍雪の功
新作ハーフマウスのためのマウントとホイールの切削.をしようと思ったが,もともと暗い環境なのに蛍光灯が切れていてほとんど加工面が見えない.何ヶ月も前から切れているけど新しいものに替わらないあたり私のサークルの活動実態を反映している.仕方ないので自転車用のライトで照らしながら作業する.昔明かりがなかった時代の苦労がわかる.
しかしながらホイール径がイマイチ.設計がよくなかったらしい.明日の夜また作ることにする.また暗いと嫌だなあ.
しかしながらホイール径がイマイチ.設計がよくなかったらしい.明日の夜また作ることにする.また暗いと嫌だなあ.
2010年9月5日日曜日
中部地区初級者大会
名古屋まで遠征してきました.今回は行き帰りともリッチに新幹線を利用したのでだいぶ楽に移動し,かつ,移動時間の有効活用ができました.参加者は多かったように思いますがスムーズに進行していましたね.さすがです.
私は,ハーフマウスの競技だけ参加し,結果は以下の通り.参加者が少なく,エキスパートの人除外のおかげですが.私は初級者なのか?ハーフでは初級者ですね.たぶん.
こじまうす6 5秒772 優勝
次は中部地区大会ですかね.それまでに今年の本番用にハーフマウスを作りたいが,どうせいろいろあって忙しいだろうな.でも作るけど.
私は,ハーフマウスの競技だけ参加し,結果は以下の通り.参加者が少なく,エキスパートの人除外のおかげですが.私は初級者なのか?ハーフでは初級者ですね.たぶん.
こじまうす6 5秒772 優勝
次は中部地区大会ですかね.それまでに今年の本番用にハーフマウスを作りたいが,どうせいろいろあって忙しいだろうな.でも作るけど.
2010年9月4日土曜日
小数点演算の単精度化
STM32に小数点演算をさせる場合は倍精度だと時間がかかるし,倍精度も必要無いので単精度で計算すべきだろうと思う.つまり全ての浮動小数点変数はfloatで宣言し,浮動小数点定数は1234Fのようにfloat型であることを明示すべき.特に定数値は数値だけ書くと倍精度として扱われるので,途中の演算が倍精度で行われて時間がかかるだけでなく,代入の時に単精度に変換することになるのでよけいにかかる.
私のマウスは現状定数には何もつけていなので倍精度で計算されていることになる.全部定数にFをつけるのが面倒だなあとか思っていたが,やはりそういうコンパイルオプションはあるらしく,
-fsingle-precision-constant
とすると定数が全て単精度になるらしい.(GCC以外にこのオプションがあるかどうかは知らない)
以下,このオプションを付けない場合の調査結果.ただし,一定時間毎に割り込みがかかってたりするので計算時間の絶対値に意味はない.
1. 304ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001;
2. 116ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001F;
3. 225ms
double temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001;
4. 406ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp / 0.9999F;
私のマウスは現状定数には何もつけていなので倍精度で計算されていることになる.全部定数にFをつけるのが面倒だなあとか思っていたが,やはりそういうコンパイルオプションはあるらしく,
-fsingle-precision-constant
とすると定数が全て単精度になるらしい.(GCC以外にこのオプションがあるかどうかは知らない)
以下,このオプションを付けない場合の調査結果.ただし,一定時間毎に割り込みがかかってたりするので計算時間の絶対値に意味はない.
1. 304ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001;
2. 116ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001F;
3. 225ms
double temp=1.0;
for(int i=0;i<100000;i++) temp = temp * 1.0001;
4. 406ms
float temp=1.0;
for(int i=0;i<100000;i++) temp = temp / 0.9999F;
初級者大会前
さて,5日は中部地区の初級者大会ですね.わりといろんな方が参加されるようで,運営の方は大変かと思います.私もハーフだけ登録してあります.といっても7月末から何も変わっていないし関西支部の大会から中途半端にプログラムを書き換えてある分遅い.とりあえず壁切れだけちゃんと読めるようになれば少しはましになるはず.あと一日あるが,調整に使えるのは2時間くらいか.
2010年8月23日月曜日
停滞
マウス活動が進んでいない.時間がない.体力も切れてきた.でもまだまだ続く.
- あと4週間はほとんど何もできない.
- 中部の初級者大会は参加するか未定.今月中に登録するか決断する必要あり.
> 福井さん
旋盤の件,私は対応できません.もし必要なら,代わりに誰か他の機械硏メンバーに頼んでください.
- あと4週間はほとんど何もできない.
- 中部の初級者大会は参加するか未定.今月中に登録するか決断する必要あり.
> 福井さん
旋盤の件,私は対応できません.もし必要なら,代わりに誰か他の機械硏メンバーに頼んでください.
2010年8月6日金曜日
さようなら,機械硏迷路
6年前に私の所属するサークル(京大機械研究会)でマイクロマウス試走用に作っていままでマウスの調整に使ってきた5x10の迷路が見つからない.台もなければ壁もない.自走機能はなく勝手に出ていったとは考えられないので(自走してくれたら今までどれだけ楽できたか),捨てられたのでしょう.たしかに今年はごたごたがあった上にもともと悲惨な(しかし考えうる最良の)保存環境でしたが,今までなくなることはなかったので油断していました.
というわけで,今年はクラシックには力を入れない方針.ハーフマウスのプログラムを移植して迷路持ってるところにおじゃましてちょこっと調整すれば去年くらいの走りはできるでしょう.ただ,ハードウェアが完成しない可能性はある.
しかし,なぜ我々のサークルは部室というものがないにも関わらず続いているのでしょう.すばらしい生存力ですね.
というわけで,今年はクラシックには力を入れない方針.ハーフマウスのプログラムを移植して迷路持ってるところにおじゃましてちょこっと調整すれば去年くらいの走りはできるでしょう.ただ,ハードウェアが完成しない可能性はある.
しかし,なぜ我々のサークルは部室というものがないにも関わらず続いているのでしょう.すばらしい生存力ですね.
2010年8月1日日曜日
関西支部試走会
昨日のことですが,マイクロマウス関西支部の試走会に参加しました.なんとなくマウス走らせに行っただけといったかんじですが.クラシックマウスは持っていっていたけれども走らせず,ハーフマウスを9x9迷路でひたすら走らせていました.
まだまだいまいちなところも多く,このあたりが限界です.
今年は昨年にも増して忙しくなりそうなので,全日本大会までに使える時間を数えて計画を立てる必要がありそうです.クラシックマウスは今年は手抜きになるかも.
まだまだいまいちなところも多く,このあたりが限界です.
今年は昨年にも増して忙しくなりそうなので,全日本大会までに使える時間を数えて計画を立てる必要がありそうです.クラシックマウスは今年は手抜きになるかも.
2010年7月24日土曜日
プログラム再構築
来週の関西支部試走会に向けて調整...ではなく調整できる体制を整えている.プログラム内に散らばっている経験定数をまとめる.役割を再確認して調整の手順を考える.できるだけ調整の必要な定数は減らしたいが,減らすと自由度がなくなってしまう.結局ちょっと増えたような気がする.
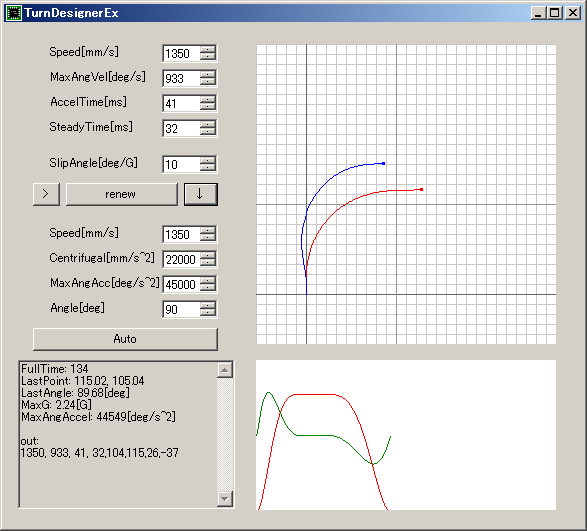
制御部はこんなかんじになった.本質的な変更はない.今まではPIDループで直接PWM dutyを与えていたが,加速度と角加速度を与える形に変更した.これでハードウェアが変わってもゲインを大きく変更する必要はないと思われる.

これで来週ハーフの迷路がなかったりしたら悲しい.
クラシックの方は放置中.これは迷路がないのでどうしようもない.
制御部はこんなかんじになった.本質的な変更はない.今まではPIDループで直接PWM dutyを与えていたが,加速度と角加速度を与える形に変更した.これでハードウェアが変わってもゲインを大きく変更する必要はないと思われる.

これで来週ハーフの迷路がなかったりしたら悲しい.
クラシックの方は放置中.これは迷路がないのでどうしようもない.
2010年7月3日土曜日
フォトセンサの指向性の問題
ハーフマウスを作って走らせてみて強く感じたことの一つにフォトセンサの指向性が低いことがあった.赤外LEDにしても,フォトトランジスタにしても半値角が10~20度と大きいからである.この場合,前センサで横壁が見えたりして壁の有無を間違えたり,姿勢制御に使えなかったりするので困る.とりあえず状況を確認するために赤色φ3のLEDを使って次の写真のような状態でテストしてみた.なお,壁が上下逆になっていることに意味はない.

横壁はあるが,前壁がない状態だと,以下のようにLEDから出た光が直接横壁に入射する.黒色板でガードしている部分はちゃんとカットされている.

横壁も前壁もある状態だと,以下のように,前壁に入射した光の散乱で横壁が照らされる.LEDの隣にフォトトランジスタを配置して受光すると,もちろん前壁からの光が圧倒的に強いが,横壁からも無視できないくらい光が入ってくる.

まとめると,光の経路として,
1. LED -> 前壁 -> フォトトラ
2. LED -> 前壁 -> 横壁 -> フォトトラ
3. LED -> 横壁 -> 前壁 -> フォトトラ
の3つがあり,1番以外をカットしようと考えるとLED,フォトトラ両方に高い指向性が求められる.まあ十分要求を満たしてくれて手の出せる価格の素子はないわけですが.
ちなみに,下2枚の写真はISO感度,シャッタースピード,F値をそろえて撮影しました.

横壁はあるが,前壁がない状態だと,以下のようにLEDから出た光が直接横壁に入射する.黒色板でガードしている部分はちゃんとカットされている.

横壁も前壁もある状態だと,以下のように,前壁に入射した光の散乱で横壁が照らされる.LEDの隣にフォトトランジスタを配置して受光すると,もちろん前壁からの光が圧倒的に強いが,横壁からも無視できないくらい光が入ってくる.

まとめると,光の経路として,
1. LED -> 前壁 -> フォトトラ
2. LED -> 前壁 -> 横壁 -> フォトトラ
3. LED -> 横壁 -> 前壁 -> フォトトラ
の3つがあり,1番以外をカットしようと考えるとLED,フォトトラ両方に高い指向性が求められる.まあ十分要求を満たしてくれて手の出せる価格の素子はないわけですが.
ちなみに,下2枚の写真はISO感度,シャッタースピード,F値をそろえて撮影しました.
2010年6月27日日曜日
コアレスモータの特性を計測4
今回は, トルク測定を試みました. 前回と同じ以下の簡単な回路で,katoさんが追記してくださった方法によって計測します.
発生起電力 Vn = 0
電流 I = V_R / R
プローブ長さ r = 22 [mm]
トルク T = r * m * g
m : 計りの指示値
g : 重力加速度
端子間抵抗 R_M = V_M / I

結果は以下のとおりで, おおむね電流の増分に比例してトルクが増加することがわかります. さらに, T切片が負であることから, 摩擦トルクがわかります. ただし, 静止状態の摩擦なのであまり役には立ちません.

ここで得られたトルク定数k_Mと前回得られた発生電圧定数k_Eにはk_E = 2*pi/60 * k_M の関係があることになっていますが, 15%ほど値がずれます. これはトルクを測るときにモータが静止状態であることに問題があるように思います. ここで知りたいのはモータがある位相にあるときのトルクではなく, 一回転の平均トルクだから.
何か簡単にできて回転状態のトルクを測る方法はないですかね?
ついでに端子間抵抗の結果は以下のとおり. ただし, これは熱平衡状態になったのを確認しているわけでもなくあくまでも目安ですが, 熱時定数がそれほど大きいとは思わないのでだいたいこれくらいでしょう.

発生起電力 Vn = 0
電流 I = V_R / R
プローブ長さ r = 22 [mm]
トルク T = r * m * g
m : 計りの指示値
g : 重力加速度
端子間抵抗 R_M = V_M / I

結果は以下のとおりで, おおむね電流の増分に比例してトルクが増加することがわかります. さらに, T切片が負であることから, 摩擦トルクがわかります. ただし, 静止状態の摩擦なのであまり役には立ちません.

ここで得られたトルク定数k_Mと前回得られた発生電圧定数k_Eにはk_E = 2*pi/60 * k_M の関係があることになっていますが, 15%ほど値がずれます. これはトルクを測るときにモータが静止状態であることに問題があるように思います. ここで知りたいのはモータがある位相にあるときのトルクではなく, 一回転の平均トルクだから.
何か簡単にできて回転状態のトルクを測る方法はないですかね?
ついでに端子間抵抗の結果は以下のとおり. ただし, これは熱平衡状態になったのを確認しているわけでもなくあくまでも目安ですが, 熱時定数がそれほど大きいとは思わないのでだいたいこれくらいでしょう.

2010年6月20日日曜日
コアレスモータの特性を計測3
前々回に試した方法で, もう少しちゃんとデータをとってみました.
モータに直列にR=0.68Ωの抵抗をつないでその両端電圧V_Rとモータの両端電圧V_Mを計測しました.
電流 I = V_R / R
発生起電力 V_n = V_M - R_M * I
回転数についてはFC-100の1000fpsでがんばってカウントする...
結果, 以下のように回転数nに対する発生起電力V_nの関係を得ることができ, 予想以上にきれいに直線にのりました. なかなか信頼できるデータではないでしょうか.

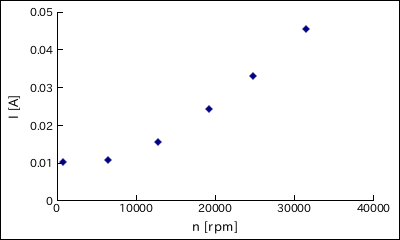
ただし, 回転数が増加すると摩擦トルクが大きいらしく, 以下のようにnの増加に伴って電流Iが増加します. 高回転で回すと効率がよくなるとは単純には言えなさそうですね.
モータに直列にR=0.68Ωの抵抗をつないでその両端電圧V_Rとモータの両端電圧V_Mを計測しました.
電流 I = V_R / R
発生起電力 V_n = V_M - R_M * I
回転数についてはFC-100の1000fpsでがんばってカウントする...
結果, 以下のように回転数nに対する発生起電力V_nの関係を得ることができ, 予想以上にきれいに直線にのりました. なかなか信頼できるデータではないでしょうか.

ただし, 回転数が増加すると摩擦トルクが大きいらしく, 以下のようにnの増加に伴って電流Iが増加します. 高回転で回すと効率がよくなるとは単純には言えなさそうですね.

2010年6月16日水曜日
コアレスモータの特性を計測2
前回電圧定数を計測したが,電圧定数とトルク定数は以下の理由により同じものなのでトルクははかる必要がない.

と言いたいけれども,実際には摩擦トルクなどがあったりするのでもう少し調査しようと思う.小さいモータは摩擦が大きいので,前回の測定値も全然信用していない.

と言いたいけれども,実際には摩擦トルクなどがあったりするのでもう少し調査しようと思う.小さいモータは摩擦が大きいので,前回の測定値も全然信用していない.
2010年6月14日月曜日
コアレスモータの特性を計測
以前からモータの特性をはかる方法がないかと思っていました.トルクをはかるのが困難だなあと思って保留になっていたのですが, とりあえずkatoさんが提案された方法で電圧定数をはかってみました.(動画は再生速度をさらに落としています.そのせいでスムーズに再生されません.)
こじまうす6に使用しているMK06-4.5で,50回転するのに215フレームかかったので,電圧定数は8.96E-5 [V/rpm]となりました.ちなみに,MK04-10で6.79E-5 [V/rpm]でした.
追記:端子間電圧1.25Vです.
こじまうす6に使用しているMK06-4.5で,50回転するのに215フレームかかったので,電圧定数は8.96E-5 [V/rpm]となりました.ちなみに,MK04-10で6.79E-5 [V/rpm]でした.
追記:端子間電圧1.25Vです.
2010年6月13日日曜日
関西支部大会参加賞
今更書くけれども,参加賞でオプトランスのLEDをたくさんいただきました.これはけっこう使えるように思う.
VSF473C1 青色LED.特性不明.
VSF666C5 赤色LED.データシート添付.親切である.
LSF880C5 赤外LED.VSF880C5と書かれているが,添付のデータシートと発光波長からLSFの間違いだと思う.
PDF130D1 フォトダイオード.特性不明.
たくさんあるけど何に使いましょうかね.
VSF473C1 青色LED.特性不明.
VSF666C5 赤色LED.データシート添付.親切である.
LSF880C5 赤外LED.VSF880C5と書かれているが,添付のデータシートと発光波長からLSFの間違いだと思う.
PDF130D1 フォトダイオード.特性不明.
たくさんあるけど何に使いましょうかね.
2010年5月31日月曜日
こじまうす6(ver1)
とにかくハーフマウスは作って走らせてみないと様子がわからないと思い,関西支部大会に間に合うように急いで作った新作6号機を紹介します.
size: 60mm x 40mm x 16mm
mass: 18g
battery: lipo 1cell 70mAh
cpu: STM32F103RET6
バッテリについては何も考えずに作ったので手持ちのものを使っていますが,決勝を走るにはおそらく容量が足りません.マイコンは少しパッケージが大きいですがRAM容量から64ピンのものを選択.

エンコーダは市販のものを使っていません.車軸に円板(ワッシャー)を偏心させて取り付け,それをはさむようにしてIR-LEDとフォトトラを対向して配置して透過光の強度からタイヤの位置(位相)を求めています.もちろん1つでは完全に位置が決定しないのでだいたい90度ずらして2セット配置しています.OSRAMのSFH3600とSFH4650.

こんな信号が出ます.この信号からテーブル参照によってタイヤの位相を出し,1ms間隔の差分から速度を計算します.ただし,精度はそれほどよくないと思います.スラローム探索とか斜め走行とかそれなりにはできるようですが.
上の平らになっているところで精度が出ないわけです.

基板はいつもどおりプリント基板をエッチングで製作.今回から抵抗とコンデンサは1005サイズ.ハンダ付けはもちろん全て自分で.はんだごては15Wのものを使用.先が細いものがほしかったのですが,近くで手に入らなかったのでこて先は普通のものを使いました.プリント基板自体はダメにしたものはなくこれ一枚だけですが,抵抗,FET,フォトトラかLEDはいくつか壊れました.
フォトセンサには小さいLEDとフォトトラを使ってみましたが,半値角が大きくかなり使いにくいです.前センサで横壁が見えます.
これものすごく低価格マウスではないかと思う.
size: 60mm x 40mm x 16mm
mass: 18g
battery: lipo 1cell 70mAh
cpu: STM32F103RET6
バッテリについては何も考えずに作ったので手持ちのものを使っていますが,決勝を走るにはおそらく容量が足りません.マイコンは少しパッケージが大きいですがRAM容量から64ピンのものを選択.

エンコーダは市販のものを使っていません.車軸に円板(ワッシャー)を偏心させて取り付け,それをはさむようにしてIR-LEDとフォトトラを対向して配置して透過光の強度からタイヤの位置(位相)を求めています.もちろん1つでは完全に位置が決定しないのでだいたい90度ずらして2セット配置しています.OSRAMのSFH3600とSFH4650.

こんな信号が出ます.この信号からテーブル参照によってタイヤの位相を出し,1ms間隔の差分から速度を計算します.ただし,精度はそれほどよくないと思います.スラローム探索とか斜め走行とかそれなりにはできるようですが.
上の平らになっているところで精度が出ないわけです.

基板はいつもどおりプリント基板をエッチングで製作.今回から抵抗とコンデンサは1005サイズ.ハンダ付けはもちろん全て自分で.はんだごては15Wのものを使用.先が細いものがほしかったのですが,近くで手に入らなかったのでこて先は普通のものを使いました.プリント基板自体はダメにしたものはなくこれ一枚だけですが,抵抗,FET,フォトトラかLEDはいくつか壊れました.
フォトセンサには小さいLEDとフォトトラを使ってみましたが,半値角が大きくかなり使いにくいです.前センサで横壁が見えます.
これものすごく低価格マウスではないかと思う.
2010年5月30日日曜日
関西支部復活記念大会
NAISTにて行われた大会にクラシック競技とハーフマウス競技に参加.朝早くから迷路の設営を手伝っていただいた方々ありがとうございました.本来は前日に完了しているべきなのですが.
私はどちらの競技の出走でもばたばたしてかなり焦りましたが,結果的にはちゃんと動いたのでよかった.
・クラシックマウス競技
1.探索,ゴール区画の段差にはまる.26.672s
2.アルミフレームを変形させて再び探索.やはり引っかかる.26.674s
3.どこが引っかかるかわかったので再度アルミフレームを変形させて探索.全面探索成功.26.673s
4.低めのパラメータで最短走行.6.402s
5.少し上げて最短走行.5.704s
最短走行が2回しかできなかったが,後で試走させるといずれにしてもこのあたりが限界らしい.それにしても探索時間の再現性がおかしい.順位は3位.
・ハーフマウス競技
1.全面スラローム探索.が,ゴール区画に入らない.袋小路カットしてしまったかと思ったが,ゴールはカットしないようにしていたはずなのでちょっと納得がいかない.R
2.一応最短走行にトライするもスタート直後で停止.やはり何かがおかしい?R
*.ここで関西支部ローカルルールを利用(プログラム書き換えOK,ただし持ち時間は減っていく).
パソコンをかばんにしまっていたのでかなり時間をロスしたが,ゴールを袋小路カットで仮想壁をたてているわけでもなく,原因不明.
3.再び最短走行.11.276s
4.さらにパラメータをあげて走行.失敗R
5.もう一度.時間切れ.(参考タイム7.661s)
なんと正式記録は最短走行のひとつだけということになってしまった.探索でゴールに入らなかったのは,ゴール区画まわりの壁が全部既知なのでその区画に入り込む必要なしと判断されたためらしい.これは修正しておかねば.4位.
今日の動画は今後の課題ということでふらふら最短走行するクラシックマウスを.というかこれしかないのですが.
今大会は運営を手伝う人の数が足りず終始ばたばたしていた印象だったかと思います.京大機械研からもっと人を確保しておくべきでした.すみません.
受領書にサインしてない...帰ってから要らなかったのかな?と気づいたがやはり必要だったか.
私はどちらの競技の出走でもばたばたしてかなり焦りましたが,結果的にはちゃんと動いたのでよかった.
・クラシックマウス競技
1.探索,ゴール区画の段差にはまる.26.672s
2.アルミフレームを変形させて再び探索.やはり引っかかる.26.674s
3.どこが引っかかるかわかったので再度アルミフレームを変形させて探索.全面探索成功.26.673s
4.低めのパラメータで最短走行.6.402s
5.少し上げて最短走行.5.704s
最短走行が2回しかできなかったが,後で試走させるといずれにしてもこのあたりが限界らしい.それにしても探索時間の再現性がおかしい.順位は3位.
・ハーフマウス競技
1.全面スラローム探索.が,ゴール区画に入らない.袋小路カットしてしまったかと思ったが,ゴールはカットしないようにしていたはずなのでちょっと納得がいかない.R
2.一応最短走行にトライするもスタート直後で停止.やはり何かがおかしい?R
*.ここで関西支部ローカルルールを利用(プログラム書き換えOK,ただし持ち時間は減っていく).
パソコンをかばんにしまっていたのでかなり時間をロスしたが,ゴールを袋小路カットで仮想壁をたてているわけでもなく,原因不明.
3.再び最短走行.11.276s
4.さらにパラメータをあげて走行.失敗R
5.もう一度.時間切れ.(参考タイム7.661s)
なんと正式記録は最短走行のひとつだけということになってしまった.探索でゴールに入らなかったのは,ゴール区画まわりの壁が全部既知なのでその区画に入り込む必要なしと判断されたためらしい.これは修正しておかねば.4位.
今日の動画は今後の課題ということでふらふら最短走行するクラシックマウスを.というかこれしかないのですが.
今大会は運営を手伝う人の数が足りず終始ばたばたしていた印象だったかと思います.京大機械研からもっと人を確保しておくべきでした.すみません.
受領書にサインしてない...帰ってから要らなかったのかな?と気づいたがやはり必要だったか.
2010年5月28日金曜日
関西支部試走会
研究活動をさぼって試走会に参加しました.会場は大変きれいです.

クラシックサイズはとりあえず動くという程度.全然スピードにのりません.滑るのかな?
ハーフサイズははじめて床を走らせて1週間ですが,案外安定して動くような.
やはり迷路が自宅にあってかつ試走会に参加というのは大きい.
この動画,横がきれてますが...
参加人数もそれほどは多くなく,参加賞がたくさんということらしく豪華そうです.

クラシックサイズはとりあえず動くという程度.全然スピードにのりません.滑るのかな?
ハーフサイズははじめて床を走らせて1週間ですが,案外安定して動くような.
やはり迷路が自宅にあってかつ試走会に参加というのは大きい.
この動画,横がきれてますが...
参加人数もそれほどは多くなく,参加賞がたくさんということらしく豪華そうです.
2010年5月26日水曜日
2010年5月25日火曜日
登録完了
テクニカルデータを入力し,関西支部大会の登録を完了した.勢いで打ったので間違っているところも多い気がする.正式登録完了の確認メールが2通きたが,これってどのロボットのやつかわかりませんね.
今大会はある程度の参加者とかなりのレベルが確保できるようでとりあえず安心.自分のが動かなくても問題無し.
現状:
5号機(クラシック競技)・・・それらしいホイールを発見し,とりあえず見た目は元通りになる.しかし迷路が無いので走るのかどうか不明.
6号機(ハーフ競技)・・・迷路はあるが,1週間で走るようになるか?2次走行はかなり厳しい.5号機のアルゴリズムでは常に斜め走行になるから.探索はがんばり次第で...
今大会はある程度の参加者とかなりのレベルが確保できるようでとりあえず安心.自分のが動かなくても問題無し.
現状:
5号機(クラシック競技)・・・それらしいホイールを発見し,とりあえず見た目は元通りになる.しかし迷路が無いので走るのかどうか不明.
6号機(ハーフ競技)・・・迷路はあるが,1週間で走るようになるか?2次走行はかなり厳しい.5号機のアルゴリズムでは常に斜め走行になるから.探索はがんばり次第で...
2010年5月16日日曜日
コンストラクタ
C++の話.
グローバルなクラスのコンストラクタはスタートアップルーチン内で呼び出されるべきで,キーワードとして,
リンク関係はやはり難しい.
グローバルなクラスのコンストラクタはスタートアップルーチン内で呼び出されるべきで,キーワードとして,
- .ctorsセクション
- __GLOBAL__I_???が実体?
リンク関係はやはり難しい.
リンクエラー
フォトセンサ用のテーブルを取り込むために以下の内容だけのソースファイルを作る.
他のソースからこれを読みにいくわけだが,リンカがシンボルがないと文句を言う.
コンパイルによって生成されたオブジェクトファイルは約700bytes.要するに最適化でカットされたということか?const float table_photo[4][4096]={
{
#include "table0_ld.txt"
},
{
#include "table1_rd.txt"
},
{
#include "table2_lf.txt"
},
{
#include "table3_rf.txt"
}
};
先頭に
extern const float table_photo[4][4096];
と書いておけばOKだった.
2010年5月9日日曜日
3D配線
プルダウンをさぼるとROMへ書き込んでいる途中モータが全力で回る.予想できていたはずなのだがなぜかさぼってしまいますね.抵抗を追加するスペースもないので,しかたなく上に逃げる.

フォトセンサまわりに問題点が残る.ちょっとまずいかもしれない.おそらく探索が安定しない.しかしまあとりあえず動くところまでもっていくことにする.

フォトセンサまわりに問題点が残る.ちょっとまずいかもしれない.おそらく探索が安定しない.しかしまあとりあえず動くところまでもっていくことにする.
作業中2
フォトセンサがとりあえず1個動作するのを確認できたが,今日は少し問題点もでてきた.
外乱光はまあとりあえず気にしないことにする.
- LED駆動のFETが小さすぎてついているのか確認不能.(DMN2005LP4K)
- LEDの極性を間違えてパターンをつくっていた.
- 上から強烈に照らされると外乱光だけでサチる.
外乱光はまあとりあえず気にしないことにする.
作業中
関西支部大会に向けてハーフマウス制作中.大会準備の方も進んでいるようなので出場する側も動くものを持っていきたい.
とりあえずSTM32に書き込みはできた.1005部品を多用しているのでハンダ付けはかなり疲れる.肉眼とかルーペとかではよく見えないのでデジカメが活躍するわけだが,最近のはマクロが得意というわけでもないカメラでもわりときれいに写るんですね.画像は状態表示用のLEDと抵抗アレイ.細かい飛沫が飛んでいて汚い.
 それでこのLEDたちは素直には光らなかった.使っているのがデバッグ用ポートで初期状態では入出力ポートとしては使えないからであるが,ライブラリを使っている場合は,
それでこのLEDたちは素直には光らなかった.使っているのがデバッグ用ポートで初期状態では入出力ポートとしては使えないからであるが,ライブラリを使っている場合は,
GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);
と一行書いておけばデバッグポートは全てoffになるらしい.昨年も同じとこで詰まったので短時間で解決した.というか詰まること自体どうかと思うが.
とりあえずSTM32に書き込みはできた.1005部品を多用しているのでハンダ付けはかなり疲れる.肉眼とかルーペとかではよく見えないのでデジカメが活躍するわけだが,最近のはマクロが得意というわけでもないカメラでもわりときれいに写るんですね.画像は状態表示用のLEDと抵抗アレイ.細かい飛沫が飛んでいて汚い.

GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);
と一行書いておけばデバッグポートは全てoffになるらしい.昨年も同じとこで詰まったので短時間で解決した.というか詰まること自体どうかと思うが.
2010年4月28日水曜日
関西支部復活記念大会登録
2010年4月25日日曜日
電源精度確保
以前からノイズを減らすために試作を繰り返していたが,妥協点に行き着いているので確認しておく.結局以下の図のようなかんじで,
・電圧リファレンスを使う(経年変化,温度変化などに対して精度確保)
・簡易的にRCローパスフィルタをいれる(レギュレータ入り口における電位の時間変化を緩和)
・ソフト側で工夫し,PWM波に同期してAD変換し,スイッチングの瞬間とかぶらないようにする
の3つがポイントである.

・電圧リファレンスを使う(経年変化,温度変化などに対して精度確保)
・簡易的にRCローパスフィルタをいれる(レギュレータ入り口における電位の時間変化を緩和)
・ソフト側で工夫し,PWM波に同期してAD変換し,スイッチングの瞬間とかぶらないようにする
の3つがポイントである.

2010年4月10日土曜日
電卓
ちょっと前の話になりますが,これに影響されてひとりごとを.
設計とかプログラムとかでよく電卓は使うが,どうもwindowsXP付属のものは使いにくい.結局excelを立ち上げるか関数電卓をかばんから取り出して使うことになる.
それに比べてUbuntuに入ってるものはかなり使える.これはいい.

結局関数電卓が便利なのは一連の計算式を入力してから処理できることだと思う.
設計とかプログラムとかでよく電卓は使うが,どうもwindowsXP付属のものは使いにくい.結局excelを立ち上げるか関数電卓をかばんから取り出して使うことになる.
それに比べてUbuntuに入ってるものはかなり使える.これはいい.

結局関数電卓が便利なのは一連の計算式を入力してから処理できることだと思う.
2010年3月28日日曜日
STM32
3月27日の関西支部勉強会での要望および衝撃的発言を受けてSTM32に関する情報を機械研究会のページで公開しました.私のサークル内でSTM32を広めるために作成したページですが,ほとんど使おうとする人がいないまま放置されていますので内容は粗く,決してわかりやすくはありません.
おそらく,今後はマイクロマウスで必要になるSTM32まわりの回路,プログラムを追加していくと思います.ただし,私の時間,体力,周囲のモチベーション次第.
不明な点などあればコメントで.
おそらく,今後はマイクロマウスで必要になるSTM32まわりの回路,プログラムを追加していくと思います.ただし,私の時間,体力,周囲のモチベーション次第.
不明な点などあればコメントで.
2010年3月10日水曜日
続々・AD変換精度
前回の投稿に関していろいろコメントいただいたので,さらに状況を整理してみる.
まず,確認として,
・部品点数を可能な限り少なくしつつ性能を確保する
のが目標である.
それで,試作回路の補足として,
・アナログ電源,デジタル電源,モータ電源は全て分離している.しかもバッテリコネクタの根元から.
・アナログとデジタル電源にはリニアレギュレータを使用.
本当は回路図を示せるといいのだが,それはそのうち.
ノイズ発生のタイミングは,
・PWM制御しているモータのon-offの切り替えのときである.
考えていくなかでわかってきた原因は,
・モータは電流連続に近い状態で回っているが,バッテリに流れる電流は連続ではない.
・ゆえに,流れる電流に応じてバッテリ電圧が変動する(内部抵抗など)ならばレギュレータ入力は不連続な電位となる.
・レギュレータはステップ入力に対して数十usのオーダで遅れがあるため,遅れ期間中は安定点とは異なる電位を示す.
これが本当であれば,解決策は,
・レギュレータ入り口の電圧変動を抑えるためにコンデンサを入れる(それなりの効果はあった)
・精度を確保すべきAVCCにLCフィルタをいれる(Nakashimaさんご提案)
など.
もう少し詳細に探らないとなんとも言えないこともあるが,実はAD変換器だけ精度を確保すればいいかというとそうでもなく,フォトセンサのLED発光強度が変動するのもまた問題となっていて,この場合それなりに電流を消費する.まあ,ジャイロほど精度にはこだわらないのであきらめてもいいが.
L,Cなどをうまく配置することを考えてもう少し試してみよう.
まず,確認として,
・部品点数を可能な限り少なくしつつ性能を確保する
のが目標である.
それで,試作回路の補足として,
・アナログ電源,デジタル電源,モータ電源は全て分離している.しかもバッテリコネクタの根元から.
・アナログとデジタル電源にはリニアレギュレータを使用.
本当は回路図を示せるといいのだが,それはそのうち.
ノイズ発生のタイミングは,
・PWM制御しているモータのon-offの切り替えのときである.
考えていくなかでわかってきた原因は,
・モータは電流連続に近い状態で回っているが,バッテリに流れる電流は連続ではない.
・ゆえに,流れる電流に応じてバッテリ電圧が変動する(内部抵抗など)ならばレギュレータ入力は不連続な電位となる.
・レギュレータはステップ入力に対して数十usのオーダで遅れがあるため,遅れ期間中は安定点とは異なる電位を示す.
これが本当であれば,解決策は,
・レギュレータ入り口の電圧変動を抑えるためにコンデンサを入れる(それなりの効果はあった)
・精度を確保すべきAVCCにLCフィルタをいれる(Nakashimaさんご提案)
など.
もう少し詳細に探らないとなんとも言えないこともあるが,実はAD変換器だけ精度を確保すればいいかというとそうでもなく,フォトセンサのLED発光強度が変動するのもまた問題となっていて,この場合それなりに電流を消費する.まあ,ジャイロほど精度にはこだわらないのであきらめてもいいが.
L,Cなどをうまく配置することを考えてもう少し試してみよう.
2010年3月7日日曜日
続・AD変換精度
少し前にAD変換の精度について考えることになって,その続きでもう少し探ってみた.やはり,特定のduty比でモータをPWM駆動するとAD変換結果がシフトする.AD変換のタイミングとモータのon-offのタイミングを考えてみると,ちょうどonからoff(brake)に変わるときにサンプリングしているようである.
そのノイズ源であるが,おそらくスイッチングの瞬間に電源(バッテリ)の電圧がステップ上に変化し,それがレギュレータを通してロジック電源(AD変換器電源)に伝わっているものと思う.レギュレータは極めて安定した電源を供給するが,データシートを見ていると,ステップ応答に対しては数十usのオーダで遅れが出るらしい.なので,スイッチングの瞬間にはAD変換したくない.
しかしながら,DCモータの制御をする上であらゆるタイミングでスイッチングが起こる可能性があり,duty制限によりスイッチングの起こらない安定した期間を作るなどが必要に思われる.
少しでも緩和するには大容量のコンデンサで変化を吸収することであるが,コンデンサはかなり場所をとるのでなるべく減らしたい.
そのノイズ源であるが,おそらくスイッチングの瞬間に電源(バッテリ)の電圧がステップ上に変化し,それがレギュレータを通してロジック電源(AD変換器電源)に伝わっているものと思う.レギュレータは極めて安定した電源を供給するが,データシートを見ていると,ステップ応答に対しては数十usのオーダで遅れが出るらしい.なので,スイッチングの瞬間にはAD変換したくない.
しかしながら,DCモータの制御をする上であらゆるタイミングでスイッチングが起こる可能性があり,duty制限によりスイッチングの起こらない安定した期間を作るなどが必要に思われる.
少しでも緩和するには大容量のコンデンサで変化を吸収することであるが,コンデンサはかなり場所をとるのでなるべく減らしたい.
2010年3月6日土曜日
ハーフ試走迷路の製作
ハーフマウスの迷路を準備しようと計画しており,壁は既に入手済であるが,加工の手段の問題で台の方はとりあえず保留していた.今日思い立ってホームセンターで4.5mmのドリル刃(差込角六角6.35mm)と同じ差込角のドライバー(もちろんグリップ目当て)を購入し,数年前から試走台として使っていた板(600mm×900mm)にひたすら穴あけ.騒音公害とならないよう,人力でひたすら穴をあけること30分,70箇所.思ったより短時間で完了した.

そしてつや消しブラックで塗装して完成.こうして見るともっと壁がほしい気もするが,特定のパターンについて調整を繰り返すのがメインで,迷路を作ることは目的ではないのでこれでいいだろう.
特に工具を持っていなくても比較的短時間で迷路ベースを作成できることがわかった.
ただ,柱を立てたまま収納するスペースなどないので使うたびに着脱を繰り返すという面倒さはある.しかし,ハーフマウスのコンセプトのとおり自宅に迷路を置けるのは大きいはず.

しかし,まだマウスがない.

そしてつや消しブラックで塗装して完成.こうして見るともっと壁がほしい気もするが,特定のパターンについて調整を繰り返すのがメインで,迷路を作ることは目的ではないのでこれでいいだろう.
特に工具を持っていなくても比較的短時間で迷路ベースを作成できることがわかった.
ただ,柱を立てたまま収納するスペースなどないので使うたびに着脱を繰り返すという面倒さはある.しかし,ハーフマウスのコンセプトのとおり自宅に迷路を置けるのは大きいはず.

しかし,まだマウスがない.
2010年2月28日日曜日
AD変換精度
AD変換の精度を確保するのは容易ではないが,マウスではジャイロセンサだけは特に高精度でデータを得たい.こじまうす5ではモータを回すとかなり不安定になり,ほとんど積分なんてできないレベルであった.
原因としては,DC-DCコンバータによって必要な電圧を作っていたこと,モータからのノイズ,などと漠然と考えていた.
試作基板にてフォトセンサのテストをしようとしていたところ,同様の現象に直面.目的を変更してその原因を調査することにした.
AD変換は10kHz,モータ駆動のPWMは20kHz.どうも特定のduty比のときに値がシフトする.これはすなわち,モータのon-offもしくはoff-onのときのノイズがちょうどAD変換のタイミングと一致しているときにAD変換値が正しくなくなる,というよりもADCの端子電圧がノイズでずれるということであろう.
どうしたものか.とりあえずコンデンサか?しかし具体的にどこからのノイズかわからないことには...オシロスコープか.
27日の関西支部の集まりには参加できませんでした.土曜日に行事があることはあまりないのですが,今回は偶然重なってしまいました.いずれにしても丸一日使う余裕がないという話もあるが.
原因としては,DC-DCコンバータによって必要な電圧を作っていたこと,モータからのノイズ,などと漠然と考えていた.
試作基板にてフォトセンサのテストをしようとしていたところ,同様の現象に直面.目的を変更してその原因を調査することにした.
AD変換は10kHz,モータ駆動のPWMは20kHz.どうも特定のduty比のときに値がシフトする.これはすなわち,モータのon-offもしくはoff-onのときのノイズがちょうどAD変換のタイミングと一致しているときにAD変換値が正しくなくなる,というよりもADCの端子電圧がノイズでずれるということであろう.
どうしたものか.とりあえずコンデンサか?しかし具体的にどこからのノイズかわからないことには...オシロスコープか.
27日の関西支部の集まりには参加できませんでした.土曜日に行事があることはあまりないのですが,今回は偶然重なってしまいました.いずれにしても丸一日使う余裕がないという話もあるが.
2010年2月20日土曜日
2010年2月13日土曜日
LY530ALH
さらに続いてSTマイクロのジャイロセンサLY530ALH.これはかなりいろんなところで話題になっている.

まずハンダ付けに関しては,こいつは横に金属がでてないのでちょっとやっかいそう.ただまあ,近くを熱してハンダを流せば染み込んでいくかんじでつけられる.ちゃんとついたか目視で確認はできないが.

次に性能.ジャイロセンサはその出力を積分して角度を知るのが最大の目的なので,ゼロ点がドリフトしては困る.とりあえず静止状態で50ms間隔で10000点サンプリング.標準偏差は1.5~2くらいだが,それには興味がない.平均値の時間変化率は,
OUTZ・・・-0.00082 /s
vref・・・-0.00065 /s
とほとんど無視できるような.

あと評価すべきは応答速度と線形性.どちらもロボットに搭載して調べるのがいいように思うがそれはもうちょっと先になってしまう.データシート上は140Hzと遅いように思うがどうだろうか.

まずハンダ付けに関しては,こいつは横に金属がでてないのでちょっとやっかいそう.ただまあ,近くを熱してハンダを流せば染み込んでいくかんじでつけられる.ちゃんとついたか目視で確認はできないが.

次に性能.ジャイロセンサはその出力を積分して角度を知るのが最大の目的なので,ゼロ点がドリフトしては困る.とりあえず静止状態で50ms間隔で10000点サンプリング.標準偏差は1.5~2くらいだが,それには興味がない.平均値の時間変化率は,
OUTZ・・・-0.00082 /s
vref・・・-0.00065 /s
とほとんど無視できるような.

あと評価すべきは応答速度と線形性.どちらもロボットに搭載して調べるのがいいように思うがそれはもうちょっと先になってしまう.データシート上は140Hzと遅いように思うがどうだろうか.
2010年2月10日水曜日
LQFP64
続きまして,STM32の64ピンパッケージ.フラックスがあればそれほど難しくはなく実装できる.手先の器用さよりも半田の表面張力,粘性,フラックスの効果を感覚的にわかっていることが重要である.こじまうす5はひっぺがしたパッケージを再度ハンダ付けして使っていた.さすがにそういうことをすると接触不良が多発したが.

これは秋月の変換基板であるが,レジストがあるので余裕だった.
ちょっと半田が少ないかな.

これは秋月の変換基板であるが,レジストがあるので余裕だった.

ちょっと半田が少ないかな.
2010年2月8日月曜日
A3906
最近は主にハーフマウスに使うことを検討している部品のテストをしている.どうしても誰かと(というより大多数と)部品がかぶるのは仕方がない.
まずは,モータドライバIC.だいぶ前に存在を知って,こちらでも名前がでてくるが,非常に小さく1素子で2個モータをドライブできる.
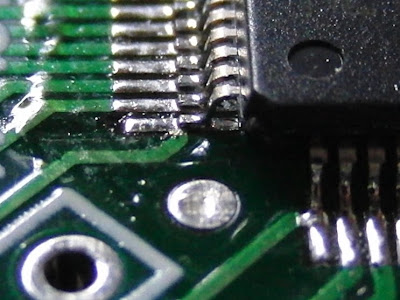
半田付けがやっかいかと思ったが,これは側面に金属部分が出ているので簡単だった.


小さい部品になると実装できるかどうかの問題がでてくるので,こういう写真が重要な情報源になりうるのではないかと思い,公開する.
それで,だいたいデータシートどおりに組んでPWM信号を送ってみると,とりあえず回った.しかし,急激にduty比を変化させるとお亡くなりになった.
- 変換基板を使っているのでコンデンサまでの距離が遠い
- コンデンサが電解コンデンサ10uFと小さすぎる
- セラミックコンデンサもいれるべき
などと考える.部品が足りないので保留.
まずは,モータドライバIC.だいぶ前に存在を知って,こちらでも名前がでてくるが,非常に小さく1素子で2個モータをドライブできる.
半田付けがやっかいかと思ったが,これは側面に金属部分が出ているので簡単だった.


小さい部品になると実装できるかどうかの問題がでてくるので,こういう写真が重要な情報源になりうるのではないかと思い,公開する.
それで,だいたいデータシートどおりに組んでPWM信号を送ってみると,とりあえず回った.しかし,急激にduty比を変化させるとお亡くなりになった.
- 変換基板を使っているのでコンデンサまでの距離が遠い
- コンデンサが電解コンデンサ10uFと小さすぎる
- セラミックコンデンサもいれるべき
などと考える.部品が足りないので保留.
2010年1月23日土曜日
2010年1月20日水曜日
ハーフ迷路壁
気がつけば1月も後半だ.今年は4日が月曜だったせいか冬休みがほとんどなかった気がする.それで今年の目標も定まらないが,とりあえずハーフの迷路壁を購入した.ベースは自作するつもりだが,できるのか?工具とか騒音とかの問題で.
簡単に壁を手に入れられるのは幸せ.RTさんのおかげである.
壁を買ってしまったからにはちゃんとマウスを作らねば.ただ,ハーフの構想がいまいちまとまらない.やはりエンコーダが...
マイクロテックのエンコーダを使えば悩むことはなくなるだろう.ただそうすると大会参加の交通費が...逆か?すなわち,大会に参加しなければ,エンコーダ2個買ってもおつりがくる.
まあそういうわけにもいかず,速度フィードバックの手段を構築するのが当面の課題となる.
簡単に壁を手に入れられるのは幸せ.RTさんのおかげである.
壁を買ってしまったからにはちゃんとマウスを作らねば.ただ,ハーフの構想がいまいちまとまらない.やはりエンコーダが...
マイクロテックのエンコーダを使えば悩むことはなくなるだろう.ただそうすると大会参加の交通費が...逆か?すなわち,大会に参加しなければ,エンコーダ2個買ってもおつりがくる.
まあそういうわけにもいかず,速度フィードバックの手段を構築するのが当面の課題となる.